




Product Description
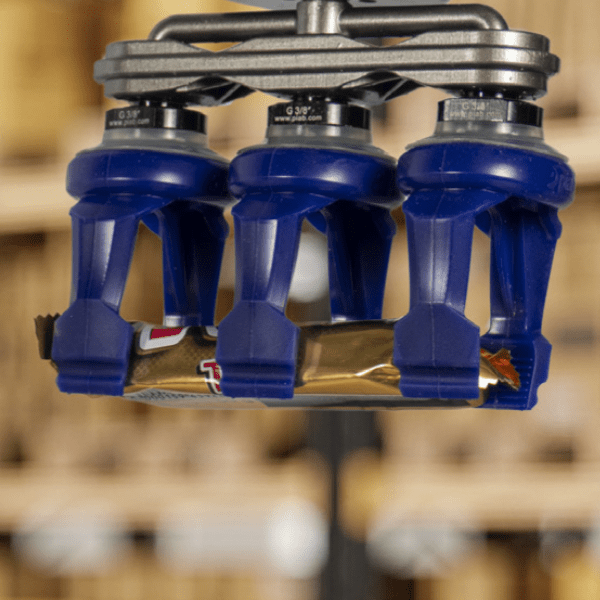
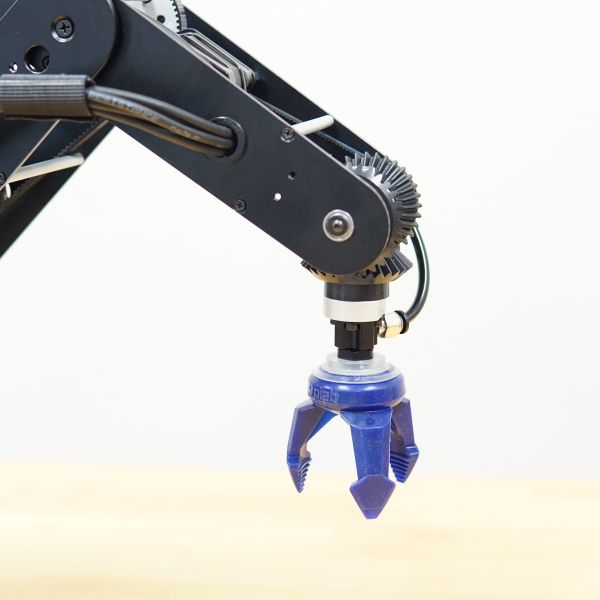
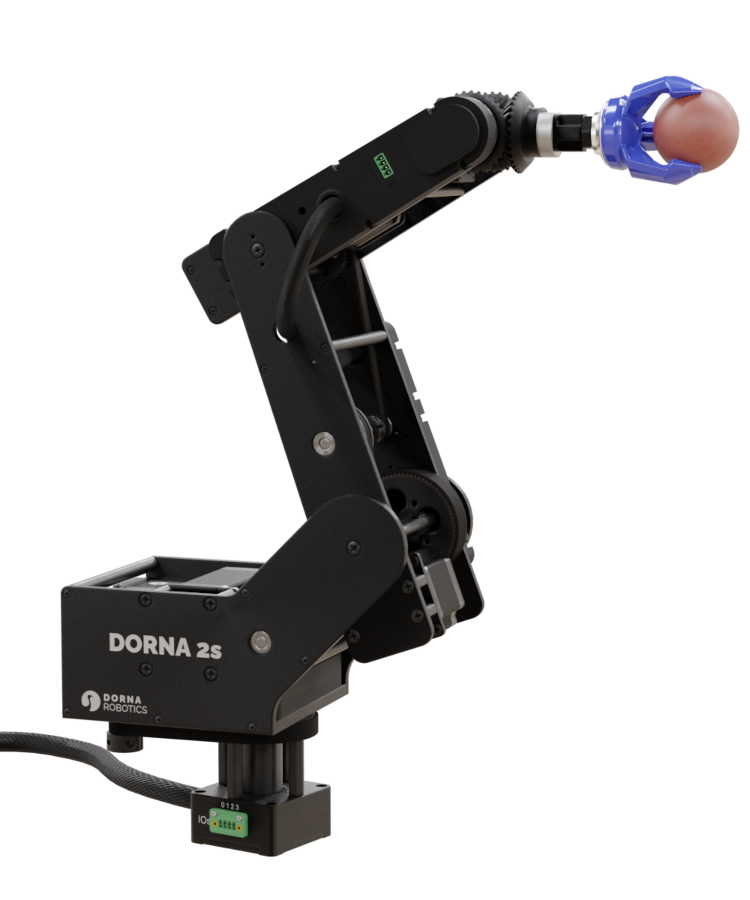
The kit contains a vacuum-driven soft gripper and everything else you need to install and run the gripper with Dorna robots, including the mounting plates, and electrical and pneumatic components (except the air compressor). The soft grippers are ideal for handling sensitive and delicate objects with odd geometries and surfaces.
Main Features
-

2-Finger And 3-Finger Options Are Available For Handling Different Shapes And Sizes.
-

The Kit Uses Piab PiSOFTGRIP® Grippers With A Cost-Effective, Simple, Robust, And Lightweight Design.
-

Easy To Control And Operate Similar To A Suction Cup, With Only One Air Port.
-

The Material Is Food-Grade Silicone, FDA And EU-Compliant.
-

Communicate Through The Robot I/Os And Seamless Integration Via Dorna Lab And The Python API.
Ideal For
- Food
- Pharmaceutical
- Bin Picking
- MedTech
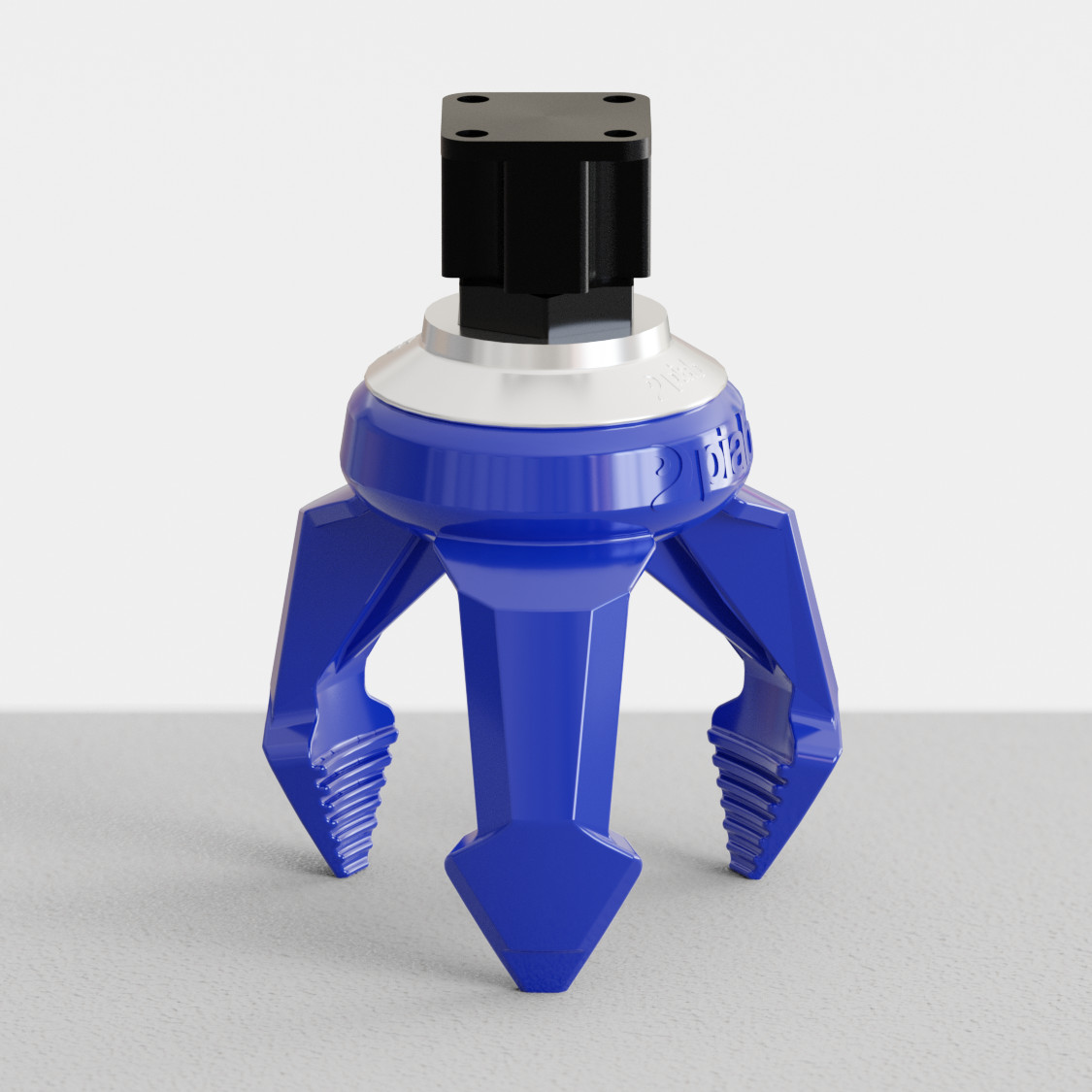
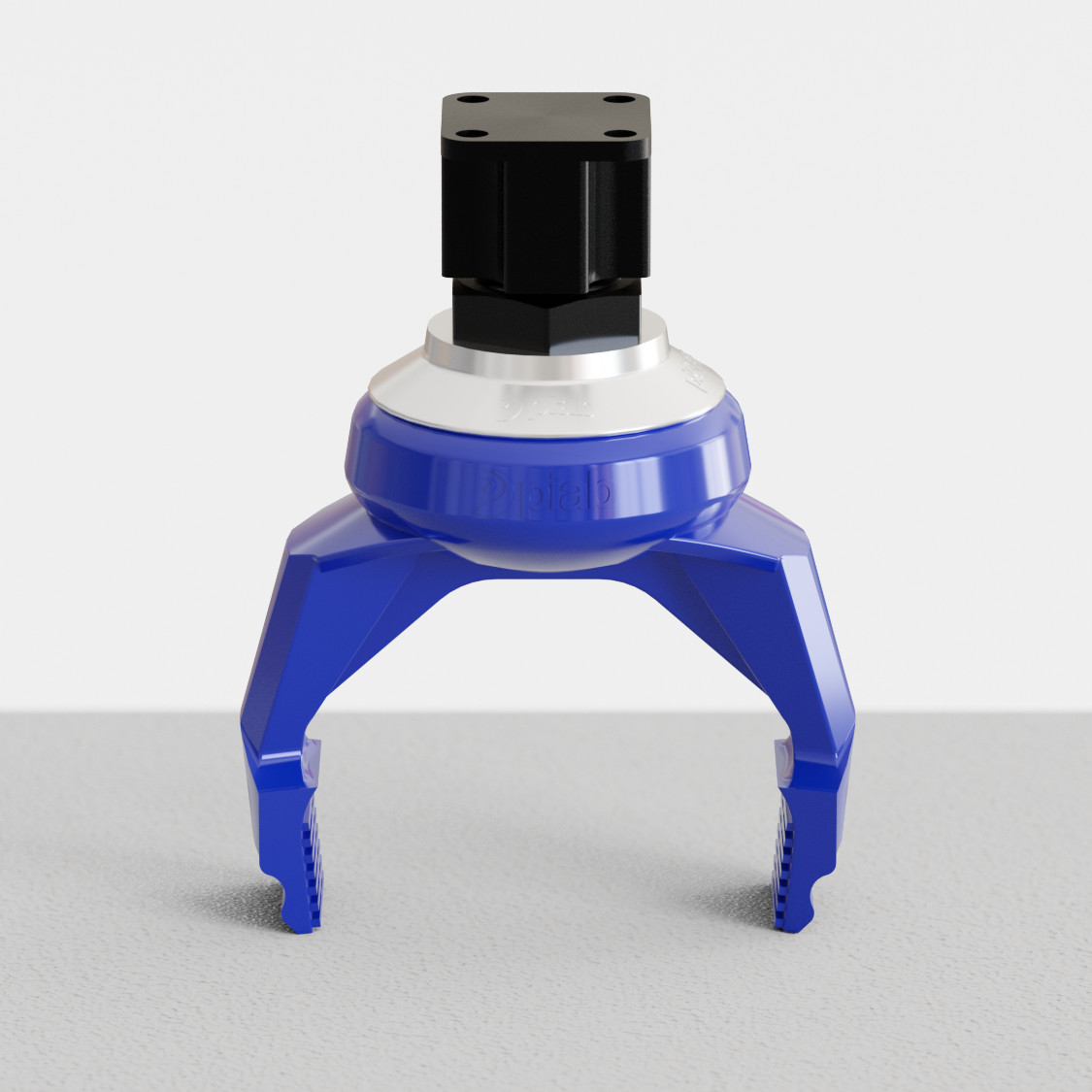
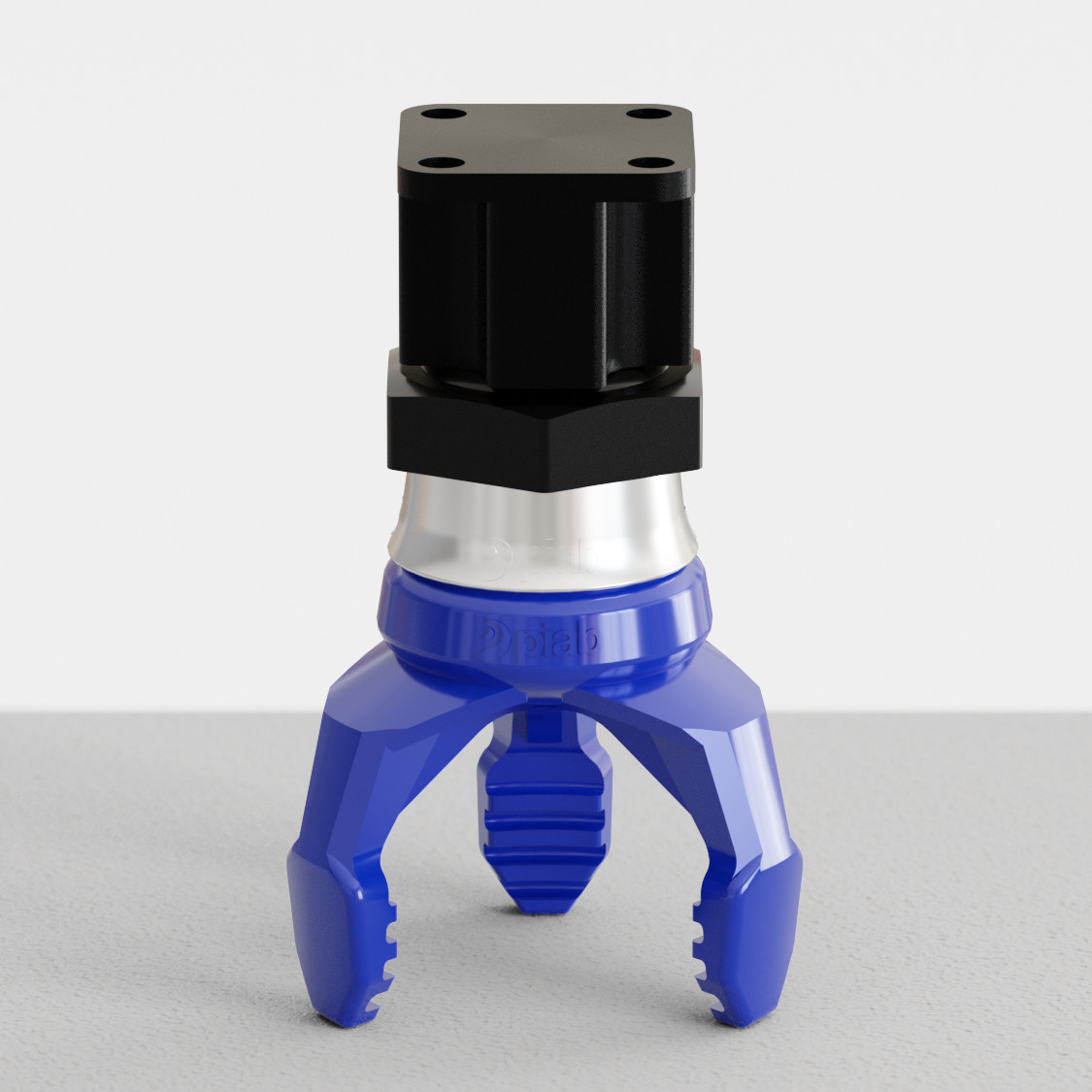
Configurations
2-Finger soft gripper
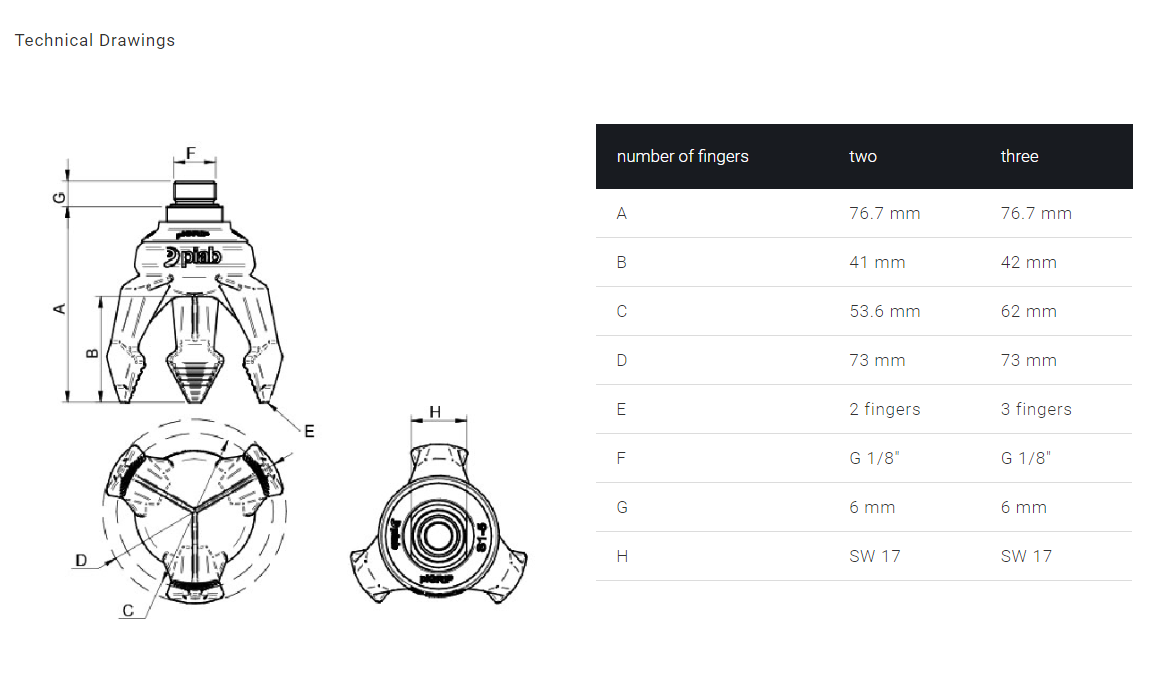
The 2-finger type has 2 angular fingers that wrap around the object and have more flexibility on where to grip the object compared to the 3-finger type.
product specifications
-
number of fingers23
-
pinch forces @ 2.9 psi0.80 N0.58 N
-
pinch forces @ 5.8 psi1.69 N2.10 N
-
pinch forces @ 8.7 psi2.40 N3.30 N
-
max object size53 mm62 mm
-
max payload150 g250 g
-
vacuum level2.9 psi – 8.7 psi2.9 psi – 8.7 psi
-
weight43 g48 g
-
fittingG 1/8″ male threadG 1/8″ male thread
-
internal volume19.17 cm319.17 cm3
{kind=link}
Specs
-
number of fingers23
-
pinch forces @ 2.9 psi0.80 N0.58 N
-
pinch forces @ 5.8 psi1.69 N2.10 N
-
pinch forces @ 8.7 psi2.40 N3.30 N
-
max object size53 mm62 mm
-
max payload150 g250 g
-
vacuum level2.9 psi – 8.7 psi2.9 psi – 8.7 psi
-
weight43 g48 g
-
fittingG 1/8″ male threadG 1/8″ male thread
-
internal volume19.17 cm319.17 cm3
Package Content

- 1. tube
- 2. IO Cable
- 3. Power Supply
- 4. soft gripper
- 5. vacuum ejector
- 6. toolhead adapter
- 7. mounting screws
- 8. Switch And Solenoid
Quickstart
To get started with the soft gripper kit, begin from here and learn how to get the gripper up and running.
FAQs
Yes. You will need a compressed air source to connect to the gripper. Any generic air compressor should do the job.
Please tell us about your requirements (sales@dorna.ai) and we will do our best to help you with your project.
The soft gripper has two states, open and close, which are controlled by an output pin of the controller.
For Soft Gripper Kit