
Blogs
Types of Grippers You Can Use for Manufacturing
This blog explores different gripper types, their features, applications, and how they improve production efficiency.
32 minute read

In This Article
End-of-arm tooling (EOAT) is a cornerstone of the automation revolution. It serves as the vital link between robots and their work environment. EOAT doesn’t just diversify and enhance a robot’s capabilities; it’s the essential component that makes any task possible.
An effective and suitable EOAT therefore, takes automation one step ahead in quality by enhancing the adaptability, precision, and efficiency of robots in various industries.
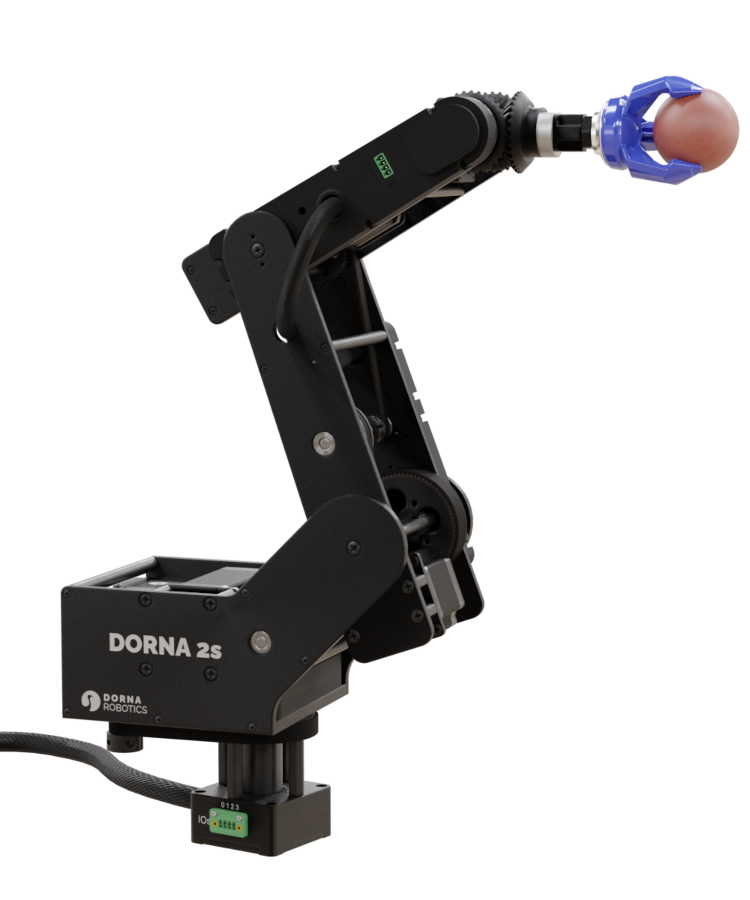
Several businesses today are elevating their industrial automation by opting for Dorna’s end-of-arm tools. We have garnered a reputation for meeting unique business needs most effectively and affordably while making their processes faster, smoother, and better through automation.
In this comprehensive guide, we will explore the various facets of end-of-arm tooling, diving deep into its uses, types, benefits, and challenges. We will also illustrate how to make the right choice for your EOAT device. But before that, let us begin by understanding what end-of-arm tooling means.
End-of-arm tooling (EOAT) is the specialized equipment – a device, tool, or process subsystem – attached to the end of a robotic arm. It facilitates the robot’s interaction with the workspace and is tailored for particular tasks in various industrial contexts, enabling the robot to assume various roles in diverse production lines.
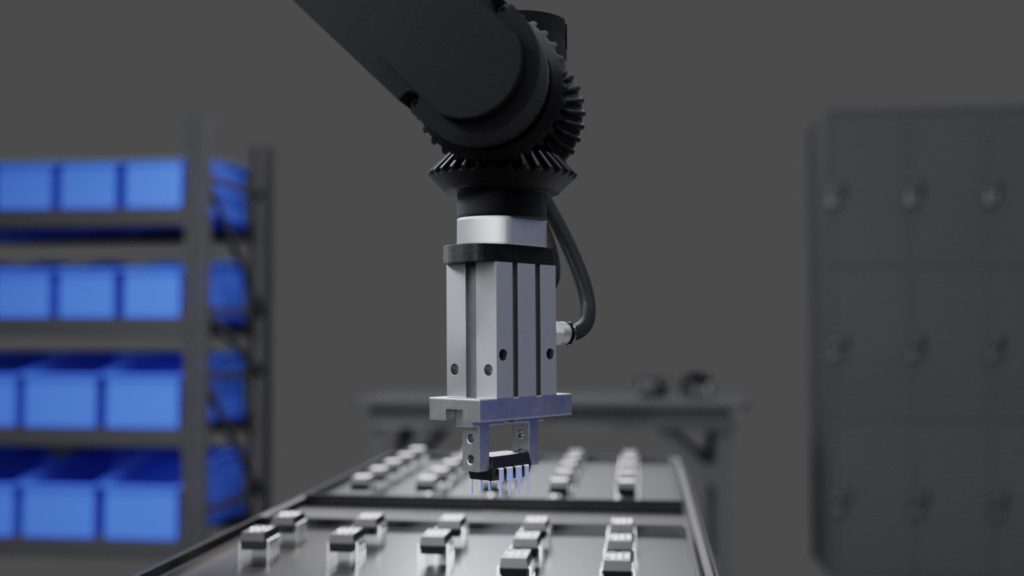
EOAT can include things like grippers, suction cups, sensors, and other tools that allow robots to grip, lift, move, assemble, inspect, and handle objects in different situations and industries.
End-of-arm tools form the essence of a robot’s capability to perform any and every task. An EOAT is therefore used for pick-and-place operations, material handling, assembly, welding, painting, packaging, and even inspection.
It can adapt to perform nearly any task that a human can, in an industrial setting. This adaptability makes EOAT a cornerstone of modern manufacturing and a key driver of efficiency in industries.
End effectors are often categorized into three main types — automation, process, and inspection/verification—further illustrating the versatility of EOAT.
Let’s take a closer look at these categories.
Various kinds of end effectors are used to carry out industrial automation tasks, such as:
Process end effectors are frequently employed in tasks like welding, painting, and cutting, primarily within industries such as automotive manufacturing and painting. These tools are designed to perform specific industrial processes with precision and efficiency, reducing the need for human intervention and ensuring consistent results.
A common example of process-based end-of-arm tooling is a robotic welding torch.
Inspection and verification end effectors incorporate sensors and vision systems to ensure quality control and provide feedback to the robotic system. They play a critical role in maintaining product quality and consistency, particularly in industries where product defects can have serious consequences, such as aerospace or medical device manufacturing.
An example of an inspection and verification end effector is a robotic camera system equipped with vision sensors.
The power source for EOAT depends on the application and the specific tool’s design. Typically, end-of-arm tools are powered pneumatically, electrically, hydraulically, or through a combination of these methods.
Pneumatic EOAT is often chosen for lightweight applications, while electric EOAT offers precise control, making it ideal for intricate tasks that demand accuracy. Hydraulics are used for heavy-duty applications that require high force and where precise control isn’t as critical.
The choice of power source is crucial and should align with the requirements of the intended task, ensuring optimal performance.

Selecting the appropriate end-of-arm tool can lead to a multitude of benefits for an organization. Some of these are:
These benefits are instrumental in remaining competitive in today’s rapidly evolving manufacturing landscape.
While EOAT offers a plethora of benefits, it’s not without its share of challenges:
It’s important to note that while there are drawbacks, the overall advantages typically outweigh the disadvantages for most applications.
Choosing the right end-of-arm tool can be a daunting task, given the vast array of options available. Here are some ways to ensure you buy the right EOAT for your business needs:
These steps form the foundation for making an informed decision when choosing the right EOAT, optimizing its performance, and ensuring successful integration into your automation system.
Dorna, a one-stop shop for industrial automation solutions offers a diverse range of grippers and other robot accessories to suit the varying needs of businesses to the last detail. You can book a demo for free to explore Dorna’s application in your warehouse processes.

Technological advancements in end-of-arm tooling (EOAT) have revolutionized the capabilities of robotic systems, offering alternative ways to enhance automation processes:
Modern EOAT incorporates advanced sensors and Internet of Things (IoT) technology, enabling real-time data collection and analysis. These sensors provide feedback on factors like force, torque, and object detection, allowing robots to adapt to changing conditions and improve safety.
AI and machine learning algorithms are integrated into EOAT enabling robots to learn and adapt to new tasks, optimize their movements, and enhance precision. This advancement is particularly beneficial in industries with complex and variable processes.
Additive manufacturing techniques, such as 3D printing, are used to produce highly customized and lightweight EOAT components. This approach reduces the weight of EOAT, increasing robot efficiency and flexibility.
EOAT can now be monitored and controlled remotely through internet-connected platforms. This feature is especially valuable in scenarios where robots are deployed in remote locations or multiple facilities.
Advancements in materials science have led to the development of EOAT components with enhanced durability, resistance to wear, and longer lifespans. These materials contribute to reducing maintenance and replacement costs.
EOAT quick-change systems have become more sophisticated, enabling rapid tool switching, which is vital for applications that require versatility and adaptability.
EOAT designs now focus on optimizing energy consumption, leading to reduced power usage and a smaller environmental footprint.
These technological advancements underscore the ever-evolving landscape of EOAT, empowering robots to tackle a broader range of tasks with greater efficiency, precision, and safety.
End-of-arm tooling is the linchpin of industrial automation, functioning as the indispensable hand of the robotic arm. It is with EOAT, that robots achieve an unprecedented level of precision and efficiency that would be unattainable otherwise.
To truly harness the potential of industrial automation, understanding the nuances of EOAT is not only beneficial but essential.
Choose Dorna to elevate your industrial automation.
Blogs
This blog explores different gripper types, their features, applications, and how they improve production efficiency.
32 minute read

Blogs, Products
Dorna, a leading name in robotics, has taken the stage with its state-of-the-art 5-axis robot arms. These innovative machines are…
22 minute read

Blogs, News
In a world increasingly defined by technological innovation, the robotics and automation industry stands, today, as the ultimate symbol of…
32 minute read

Blogs
This blog aims to explore the essence of pick and place robots, providing a comprehensive understanding of their components, operational…
30 minute read