Automation
Components.
Robots, vision systems, grippers, rails, and fixtures — everything you need to build and scale your lab automation.

Dorna TA
Compact 6-axis arm with absolute encoders, safety brakes, and collision detection.

Dorna 2
Versatile 5-axis arm with closed-loop control and up to 3 auxiliary axes.

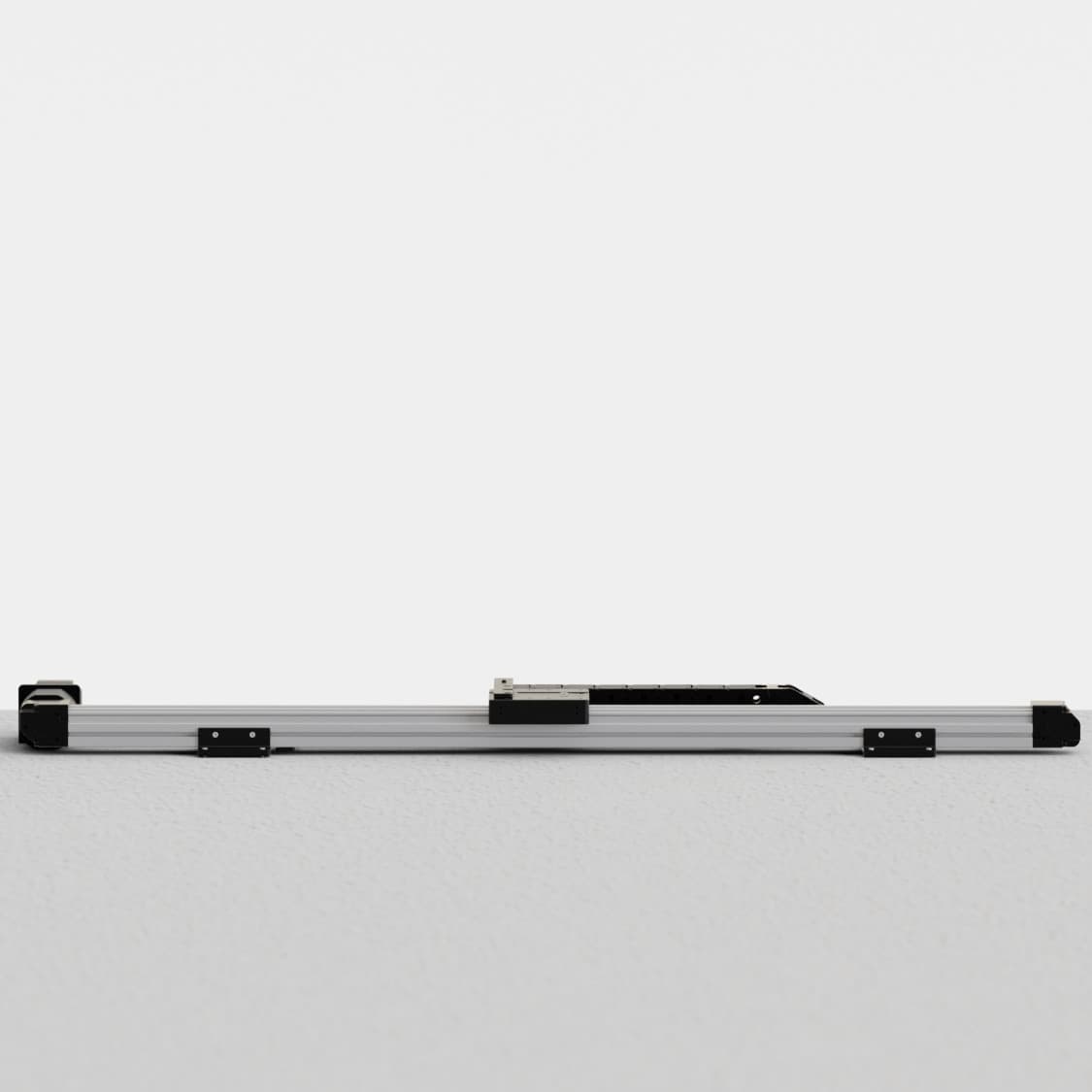
Rail Kit – HD Series
Linear rail for Dorna TA. Available in 500mm, 1000mm, and 2000mm lengths.
Rail Kit
Linear rail for Dorna 2. Fully synchronized as a coordinated axis.

Suction Gripper Kit
Vacuum gripper with swappable suction cup for various surfaces and shapes.

Soft Gripper Kit
Soft gripper for delicate objects. Food-grade silicone, 2 or 3 fingers.

Pneumatic Gripper Kit
Air-powered gripper for solid objects. 2 or 4 finger configurations.

Vision kit
3D stereo camera and AI vision processor. Mounts directly on Dorna TA.

Fixture Plate
Aluminum work surface with M5 hole grid. Expandable and connectable.
Not sure which components
you need?
Our team can help you select the right combination for your workflow. Get in touch for a tailored recommendation.