Blog.
Product launches, partnerships, and perspectives on lab automation.

How We Automated Syringe Packaging and Inspection for a Top-5 Pharma Company
From manual tray packing to AI-powered automation — deployed on the production floor in weeks.
Read more
What Lab Automation Actually Costs — And Why Most Labs Get It Wrong
Hardware isn't the primary cost driver in lab automation. Here's what actually drives project costs — and how to budget correctly.
Read more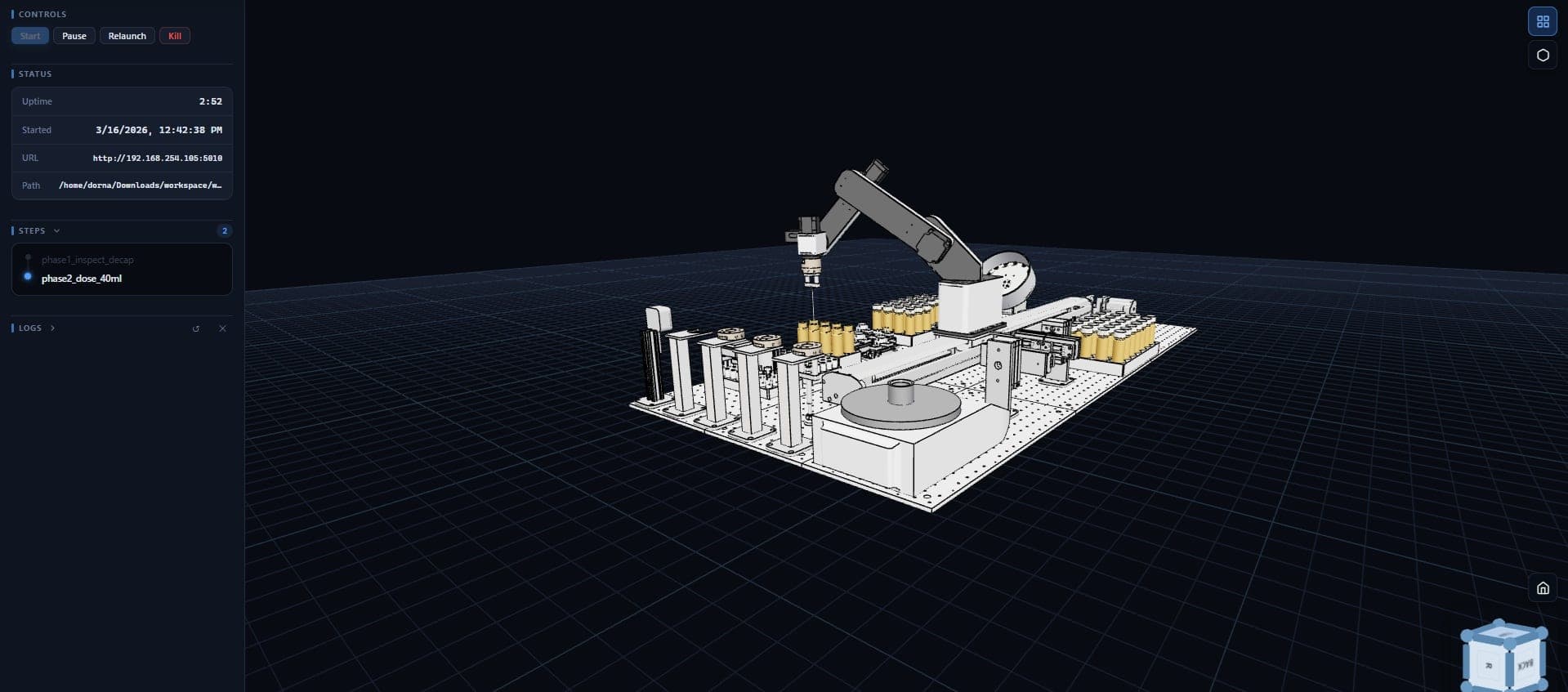
Introducing Dorna Workspace: The Missing Piece in Lab Automation
Lab automation has always had a software problem. We built Workspace to solve that — a complete platform for designing, building, simulating, and running lab automation solutions.
Read more
Dorna and Pace Analytical Are Building the Future of Environmental Lab Automation Together
We're proud to announce a formal collaboration with Pace Analytical — one of North America's largest and most respected environmental and analytical testing laboratories.
Read more
Dorna at SLAS 2026: What We Showed, What We Heard
Two live demos, an early look at Dorna Workspace, and conversations that confirmed what we've been building is exactly what labs need.
Read more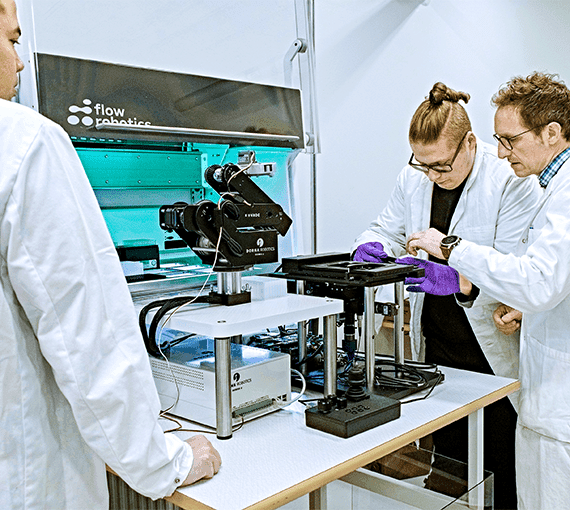
How Uppsala University Is Using Dorna Robots to Automate Bioscience Research
Uppsala University's Pharmaceutical Biosciences lab is using Dorna robots for sample preparation, cell sorting, and compound isolation — while training the next generation of lab automation engineers.
Read more